

ViWo虚拟仿真系统,包含面向飞行模拟器的视景仿真系统、应急响应仿真推演系统、复杂场景的绘制引擎、复杂真三维场景的自动构建系统和三维场景下多源在线信息融合和媒体分析直播系统。
具备千万级面片的高速实时绘制能力,支持各种云雾和海洋等特效绘制,支持季候气候变化特效和各种物理飞行仿真特效; 采用全球统一场景数据库的集群系统,存储场景多维信息,支持多线索主题信息层次显示,突出识别与显示机场及周围地 标的各种动态信息;全景柱幕或球幕的虚拟场景多通道无缝校正拼接软融合技术,每个通道的三维场景水平视角约为±70°, 垂直为-40°~20°;支持高并发实时访问的分布式视景仿真系统;自主研发的平台系统,及配套工具,包括基于航拍图片 集的三维场景快速重建处理与场景融合工具,三维复杂场景快速构建工具,绘制引擎和物理引擎,信息可视化工具等。
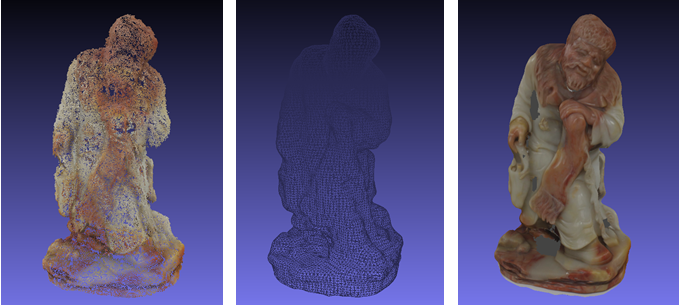
i23D:外形精度更高,纹理效果更好,操作更方便。
颜色一致性与visual hull方法的结合:点云精度更高;
基于Mask的自适应网格生成方法:网格数量少,精度高;
法向校正的三维纹理重建方法:重建精度更高,更快;

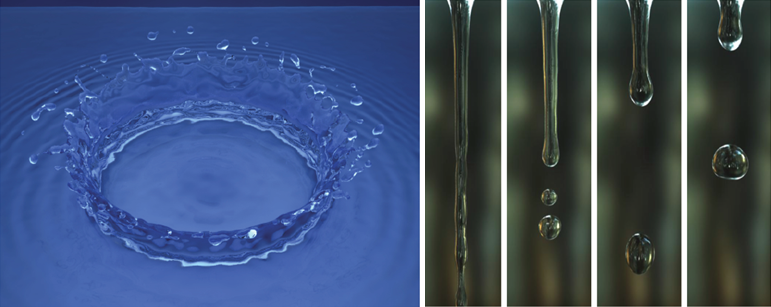
图示为高逼真度流体仿真的效果图。

ViWo虚拟仿真系统,包含面向飞行模拟器的视景仿真系统、应急响应仿真推演系统、复杂场景的绘制引擎、复杂真三维场景的自动构建系统和三维场景下多源在线信息融合和媒体分析直播系统。
具备千万级面片的高速实时绘制能力,支持各种云雾和海洋等特效绘制,支持季候气候变化特效和各种物理飞行仿真特效; 采用全球统一场景数据库的集群系统,存储场景多维信息,支持多线索主题信息层次显示,突出识别与显示机场及周围地 标的各种动态信息;全景柱幕或球幕的虚拟场景多通道无缝校正拼接软融合技术,每个通道的三维场景水平视角约为±70°, 垂直为-40°~20°;支持高并发实时访问的分布式视景仿真系统;自主研发的平台系统,及配套工具,包括基于航拍图片 集的三维场景快速重建处理与场景融合工具,三维复杂场景快速构建工具,绘制引擎和物理引擎,信息可视化工具等。