Education:
Ph.D. candidate, Peking University, Department of Computer Science 2012.9 - now
B.Sc., Beihang University, Department of Software 2008.9 - 2012.6
Awards:
2009.6 Third prize of BUAA Mathematics Competition
2010.5 Third prize of 2010 Ninth Perking University "NetEase YouDao Cup" ACM Competition
2010.5 First prize of BUAA "Feng Ru Cup" Students' Original Competition of Academic & Technological
2010.10 National Scholarship
2010.11 First prize of BUAA Study Scholarship
2011.5 First prize of BUAA "Feng Ru Cup" Students' Original Competition of Academic & Technological
2011.10 Second prize of China Students Service Outsourcing Innovation & Entrepreneurship Competition
Research:
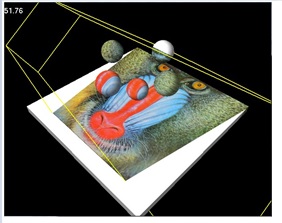
Projective Texture Mapping & Shadow Mapping
Projective texture mapping is a method of texture mapping that allows a textured image to be projected onto a scene as if by a slide projector.Projective texture mapping is essentially a special matrix transformation which is performed per-vertex. So the vertexs on the ray started from projector center will be applyed the same texture without taking into account the occlusion.
So Shadow Mapping is needed to solve that. Shodow Mapping tests whether a vertex is visible from the projector, by comparing the vertex's depth to a z-buffer or depth image of the projector source's view.
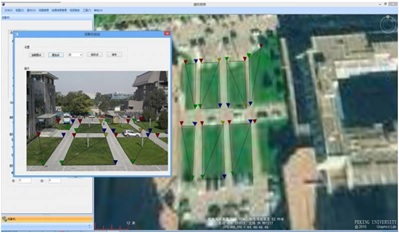
Photo Registration
Given a photo, we need to compute the intrinsic and extrinsic parameters. Actually, we call it the camera calibration. When the camera(projector is the same) parameters are known, we can build the projective texture generating matrix. In order to finish the registration, we need at least 6 corresponding points(the pixel and the vertex).We use the interation to solve it. In future, we will try to register a photo automatically.
Multi-Texture Fusion
When doing the projection, there may be multi-projectors.That is to say, a vertex may be covered by more than one projectors.So how to build the vertex's texture is a intersting problem to research.There are a lot of factors should be taken into account. For example, the distance between projector and the vertex, the angle of the projector's view and the virtual view, the picture dimension and so on.
Video Projection
Video projection can be seen an extension to photo projection, which the photo used to project will be changed as time changes.Also, we can get the dynamic information to augmented the virtual environment.
Video Objects Segmentation & tracking
We want to segmentate moving objects of videos.To get the foreground objects, we need to build the background of video first and do the subtraction.We also use the optical flow to track objects in order to guarantee the Spatio-temporal consistance.
Image-Based-Localization & Visual Place Recognition
Image-Based Localization address the problem of estimating the position and orientation of a camera given an image taken by it. Assuming the scene is represented by a 3D Structure-from-Motion model, 2D-3D correspondences between 2D feature in the query image and 3D points in the model can be found to solve the pose of the query image. The key problem is how to find the correspondences efficiently and effectively.
Similarly, visual place recognition aims to approximate the position of the viewer by identifying the place visible in the query image using image retrieval methods. The key problem is to find the discriminative features of images taken from the place and match these feature among those images.